TLD2.2
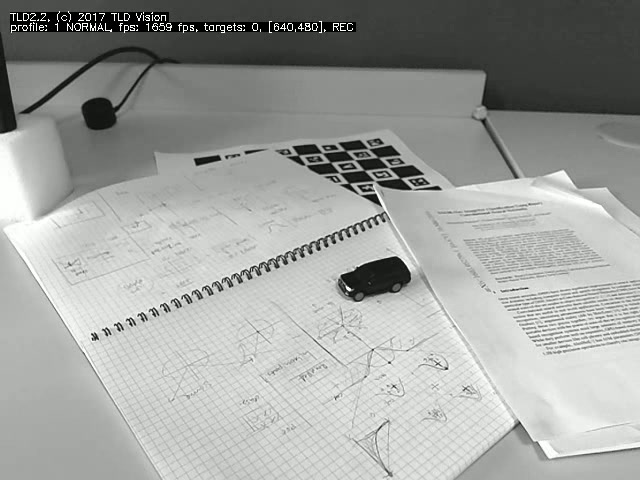
TLD2.2 is a C++ library for 2D tracking and online learning of generic objects. It is most appropriate for real-time applications with limited compute power that wish to track all kids of objects and ensure re-detection capabilities. TLD2 is a system which includes tracking, on-line learning and detection in a single real-time process. Considering these components all at once is what makes this technology unique.
Initialization
Tracking is initialized by a single bounding box. Given this bounding box, TLD immediately learns the initial target model.
Tracking
The object is then tracked using frame-to-frame tracker as long as it is visible. The tracker reports the object state using a bounding box which defines the location and scale in the image coordinates. During tracking the model is continuously updated with new information about the target.
Detection
In the event that the target becomes fully occluded or dispersals from the field of view, TLD uses the online learned model and re-detects the target once it becomes visible again. Tracking can thus continue without any interruption much longer than conventional trackers.
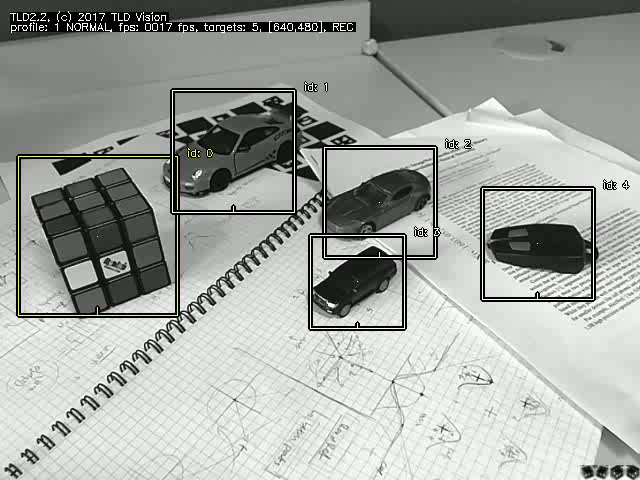
Multiple Targets
Multiple targets are tracked and learned simultaneously. These can be saved for later use and loaded to memory once they become relevant again. In this case the target is re-initialized automatically using the previously saved model.
Clients